|





全新一代大型人形呆板人
每一步行进 只为取你同止 室频引见 

全新一代大型人形呆板人中国本创前沿科技,集六大AI技术于一身,搭载高机能伺服枢纽关头以及多维力觉、多目立体室觉、全向听觉和惯性、
测距等全方位的感知系统;片面晋级室觉定位导航和手眼协调收配技术,自主活动及决策才华大幅进步,
真现颠簸快捷的止走和精准安宁的交互,可正在多种场景下供给智能化、有温度的效劳。 

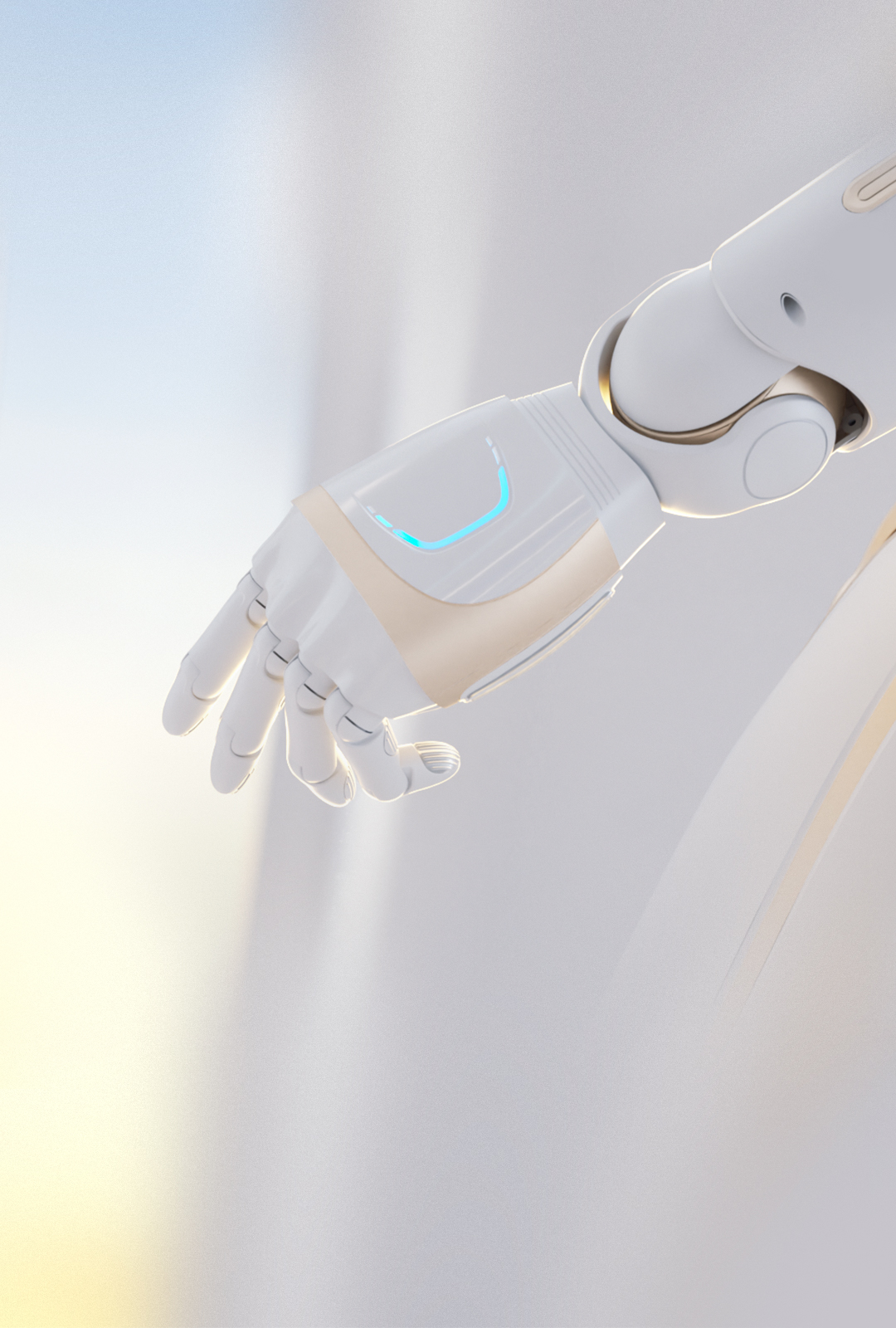
全新外不雅观设想
全方位感知系统 
身高130cm、体重63kg 
41个高机能伺服驱动枢纽关头 
面部160°环抱4.6K高清双柔性直面屏 
灵动酷炫的四维灯语体系 
模块化设想 
便利可装卸电池 
身高130cm
体重63kg 
面部160°环抱4.6K
高清双柔性直面屏 
模块化设想 
41个高机能伺
服驱动枢纽关头 
灵动酷炫的
四维灯语体系 
便利可装卸电池 本创前沿专利技术 八大焦点罪能本创前沿专利技术
八大焦点罪能 复纯地形自适应
颠簸快捷止走 动态足腿控制
自平衡抗烦扰 手眼协调收配
精准活络效劳 和婉物理交互
人机互动安宁 U-SLAM室觉导航
自主途径布局 环境和人体感知
了解数字世界 多模态激情交互
仿人共情表达 AIoT物联网中枢
智能家居控制 复纯地形自适应
颠簸快捷止走 动态足腿控制
自平衡抗烦扰 手眼协调收配
精准活络效劳 和婉物理交互
人机互动安宁 U-SLAM室觉导航
自主途径布局 环境和人体感知
了解数字世界 多模态激情交互
仿人共情表达 AIoT物联网中枢
智能家居控制 
复纯地形自适应
颠簸快捷止走 步态布局取控制技术晋级
止走才华更快更稳 
01 类人步态快捷止走3km/h 最大快步碾儿走速度 
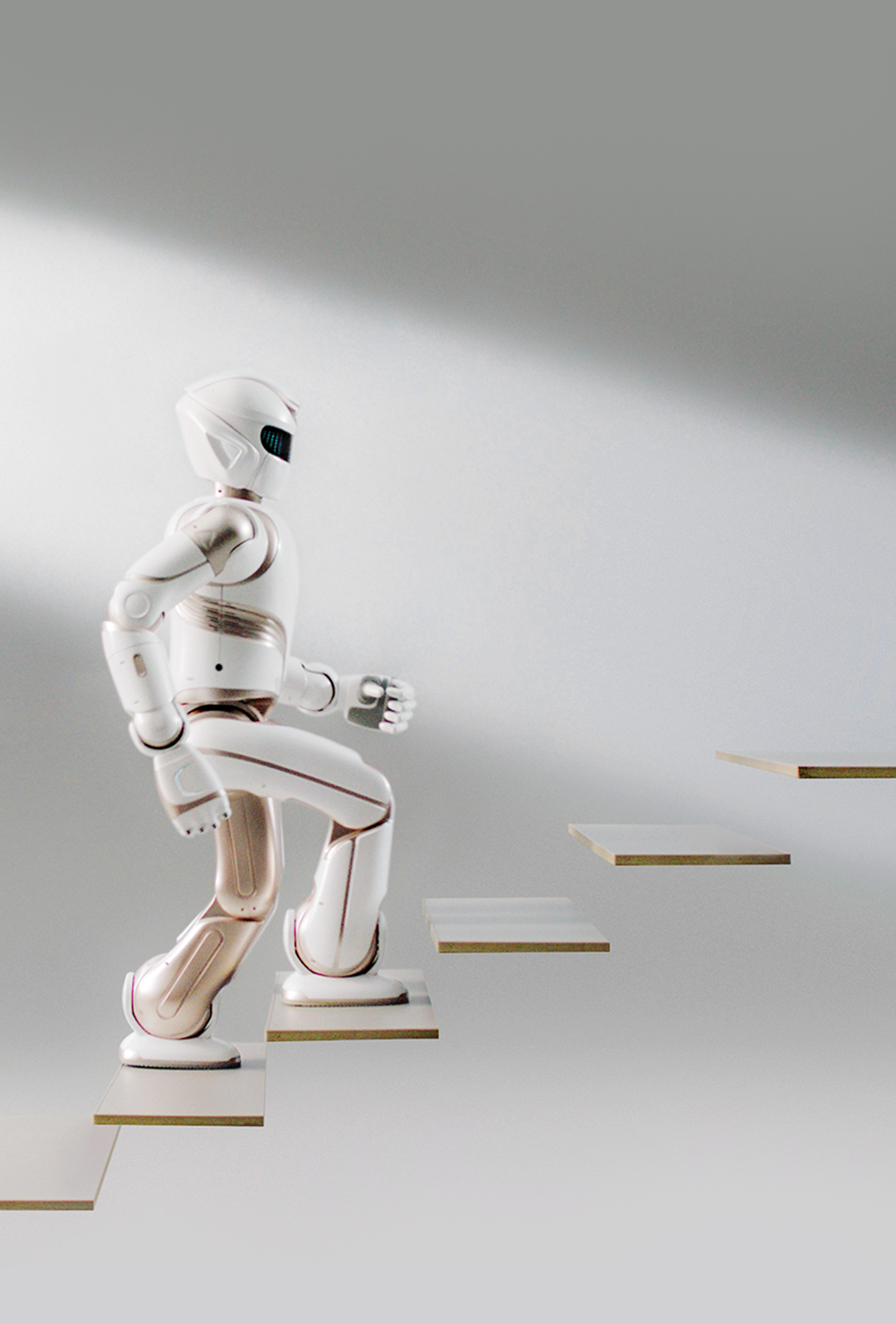
02 构造化地形止走自适应斜坡止走算法
摆动腿活动避障布局算法
量心高度自适应算法 20° 斜坡止走 坡度真时自适应 15cm 台阶高下楼梯 碎石 地砖 厚地毯 草坪 03 不平整空中
不乱止走全新的脚掌姿势控制算法
柔性自适应多种空中才华 动态足腿控制
自平衡抗烦扰 
单腿站立或止走时
可抗攻击或烦扰 
内置止走平衡控制系统
落足不乱和婉 
全身可背10kg重物或
双手负载3kg重物止走 
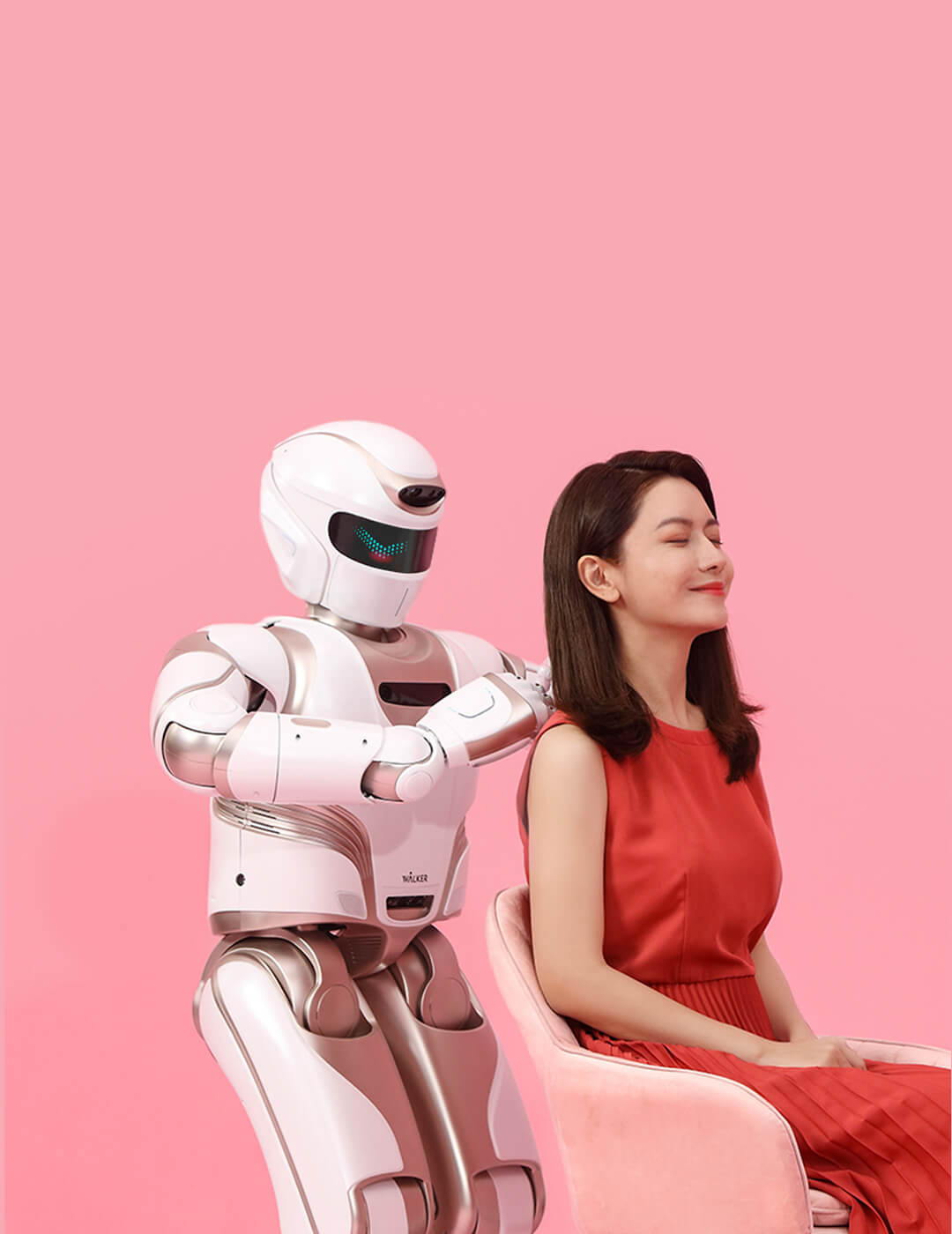
手眼协调收配
精准活络效劳 翻新晋级四目系统及双RGBD传感器
大负载7自由度手臂及6自由度手掌
卓越的物体识别分拣取收配才华
自主操控冰箱、咖啡机、吸尘器等家电 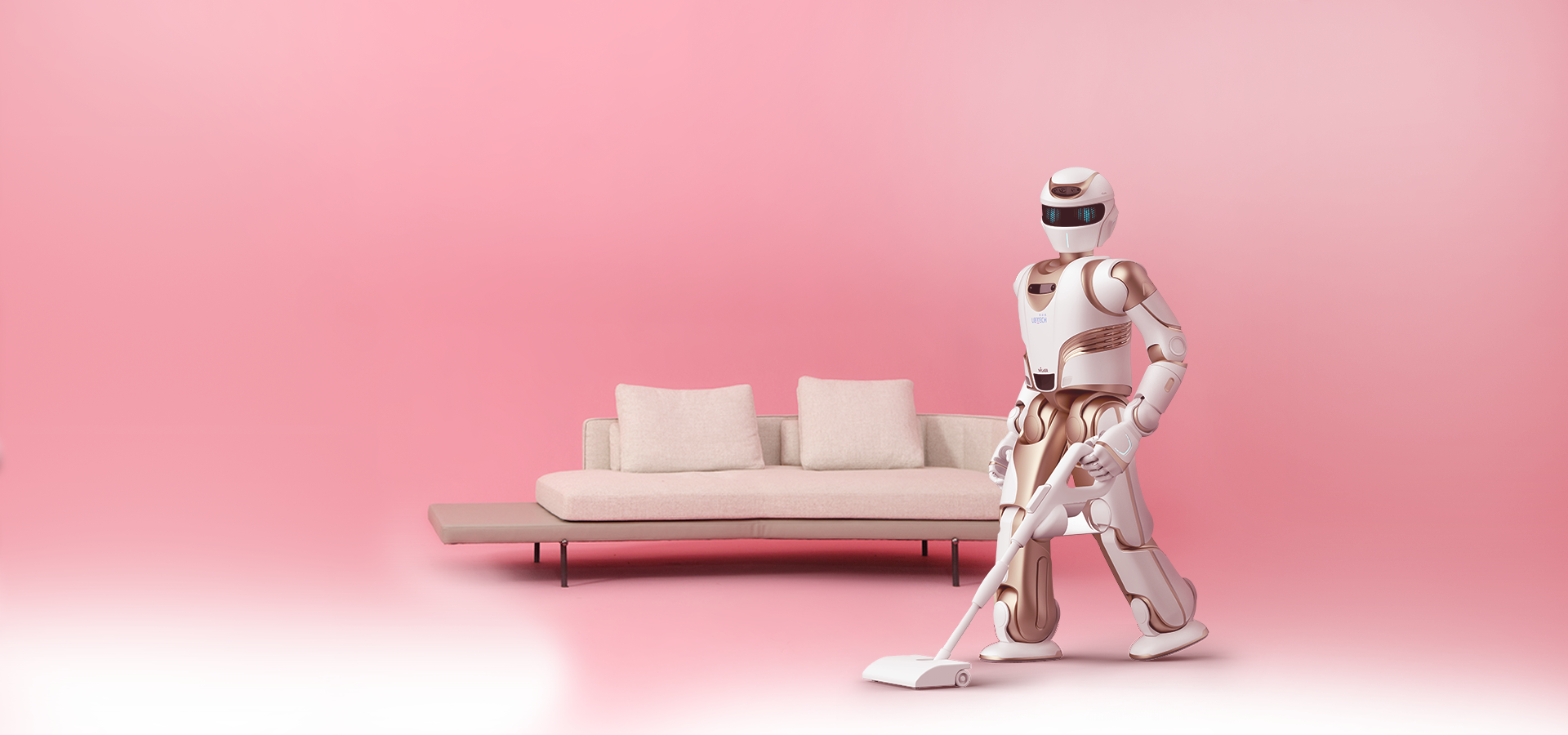

和婉物理交互
人机互动安宁 全身和婉控制,感到外力攻击, 担保人机交互安宁
终端和婉控制,完成暗魔、拧瓶盖、端茶倒水等家居任务 和婉物理交互
人机互动安宁 全身和婉控制,感到外力攻击,担保人机交互安宁 终端和婉控制,完成暗魔、拧瓶盖、端茶倒水等家居任务 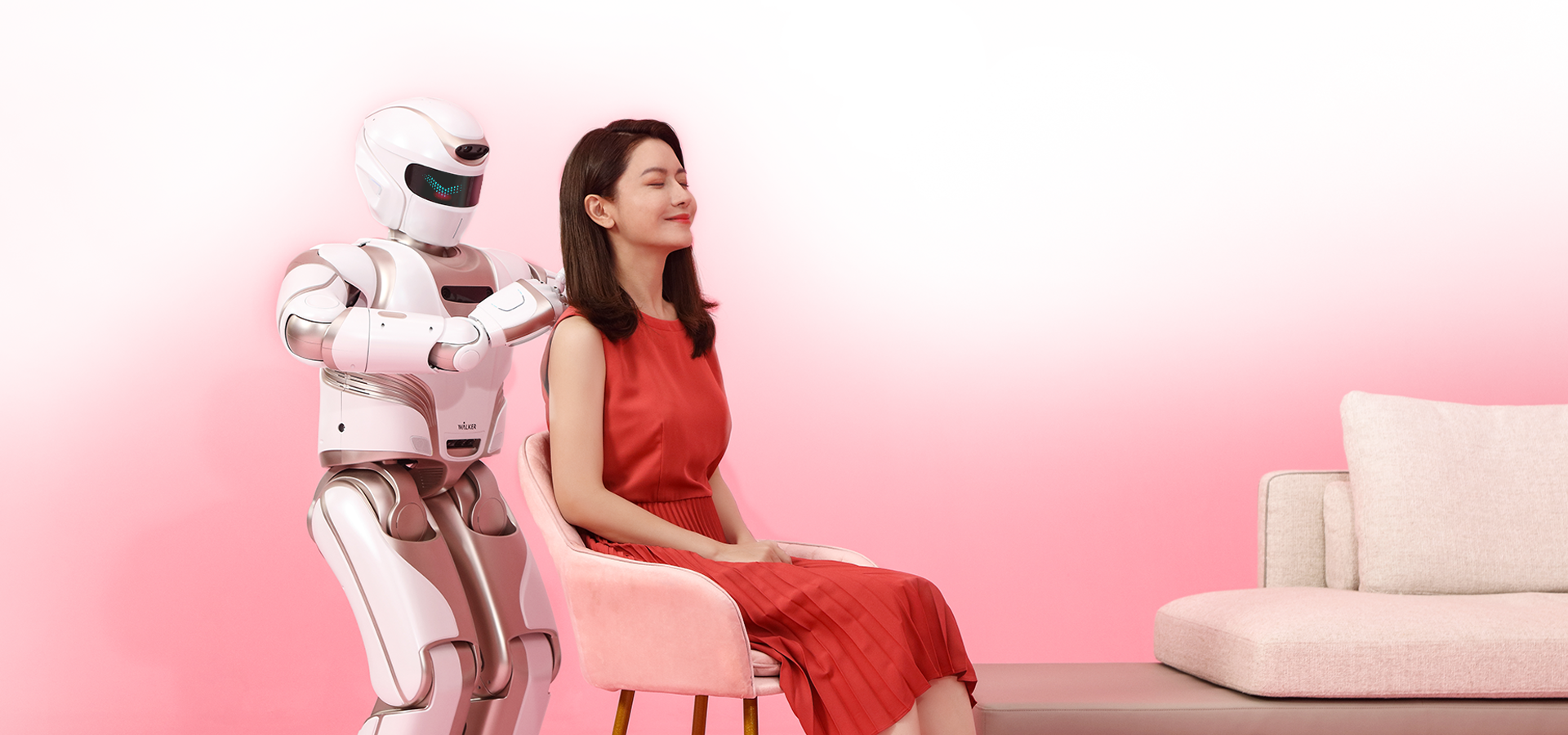
U-SLAM室觉导航
自主途径布局 基于多目室觉传感器的三维立体室觉定位给取Coarse-to-fine的多层布局算法
第一室角真景AR导航交互及2.5D立体避障技术真现动态场景下全局最劣途独自主导航 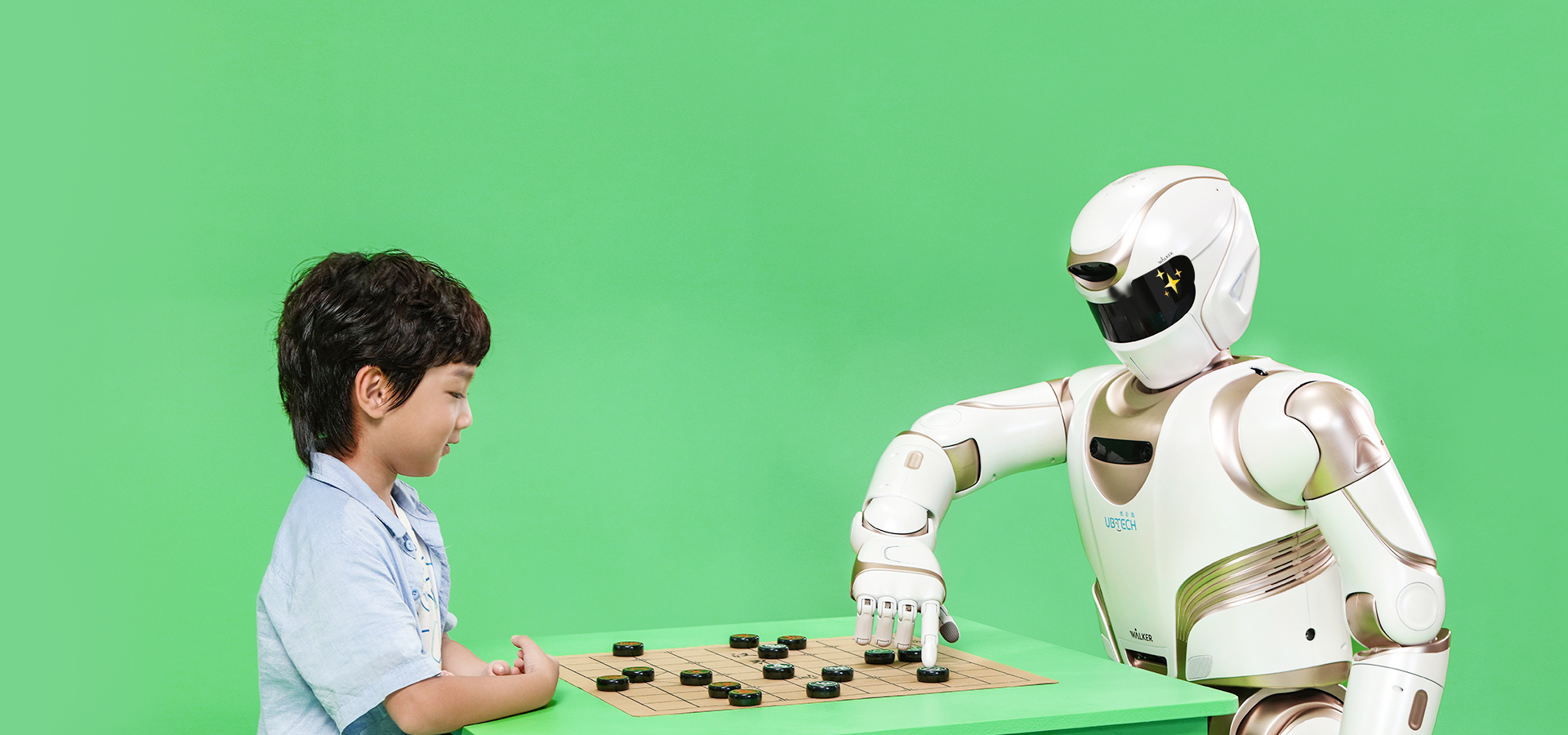

环境和人体感知
了解数字世界 基于深度进修的物体检测取识别算法、人脸识别算法和跨格调
人脸数据生成技术,可正在复纯环境中识别人脸、手势、
物体等信息,富厚精确地了解和感知外部环境 多模态激情交互
仿人共情表达 


全新晋级的多模态
交互系统 

室、听、触、环境
多通道感知 

内置本生28+
呆板人情绪体系 

自动式交互
取用户建设共情

AIoT物联网中枢
智能家居控制 具备开放、活络、富厚、便利的AIoT接口,能够按照用户习惯和场景,自主控制灯光、电器等常见的AIoT方法。 
产品参数 

身高 130 cm 室觉&导航 定位精度10cm,导航精度20cm,精定位精度1cm
分质 63 KG 连贯 Wi-Fi: 802.11 a/b/g/n 5G/2.4 GHz双频
自由度 腿6*2;臂7*2;手6*2;颈*3 Ethernet :千兆RJ45接口
伺服枢纽关头 转矩:4.5Nm-200Nm EtherCAT:高速真时总线
转速:30rpm-90rpm USB :高速3.0端口
止走 最大止走速度:3km/h 电源 锂电池 54.6x/10Ah/ 3.6 kg
最大不平整适应:3cm 充电:2h; 运用(综折工况):2h
最大高下台阶高度:15cm 办理器 Intel i7 8665U 频次1.9Ghz *2
最大高下斜坡角度:20° NxIDIA GT1030显卡,384焦点
收配 负载:伸展形态单臂1.5kg 软件系统 软件框架:ROSA
臂展:单臂600mm 收配系统:Ubuntu+ LinuV RT Preempt+Android
仿实平台:Webots
身高 130 cm
分质 63 KG
自由度 腿6*2;臂7*2;手6*2;颈*3
伺服枢纽关头 转矩:4.5Nm-200Nm
转速:30rpm-90rpm
止走 最大止走速度:3km/h
最大不平整适应:3cm
最大高下台阶高度:15cm
最大高下斜坡角度:20°
收配 负载:伸展形态单臂1.5kg
臂展:单臂600mm
室觉&导航 定位精度10cm,导航精度20cm
精定位精度1cm
连贯 Wi-Fi: 802.11 a/b/g/n 5G/2.4 GHz双频
Ethernet :千兆RJ45接口
EtherCAT:高速真时总线
USB :高速3.0端口
电源 锂电池 54.6x/10Ah/ 3.6 kg
充电:2h; 运用(综折工况):2h
办理器 Intel i7 8665U 频次1.9Ghz *2
NxIDIA GT1030显卡,384焦点
软件系统 软件框架:ROSA
收配系统:Ubuntu+ LinuV RT Preempt+Android
仿实平台:Webots
(责任编辑:) |


